Hello, I have no idea for what to do with code for when I try to verify, the code doesn’t work. Stuff like button and DCMDriver doesn’t work and such. please help me!
https://www.circuito.io/static/reply/index.html?solutionId=5bd670ebab8ee9002fce140e&solutionPath=storage.circuito.io
dear khaoskey,
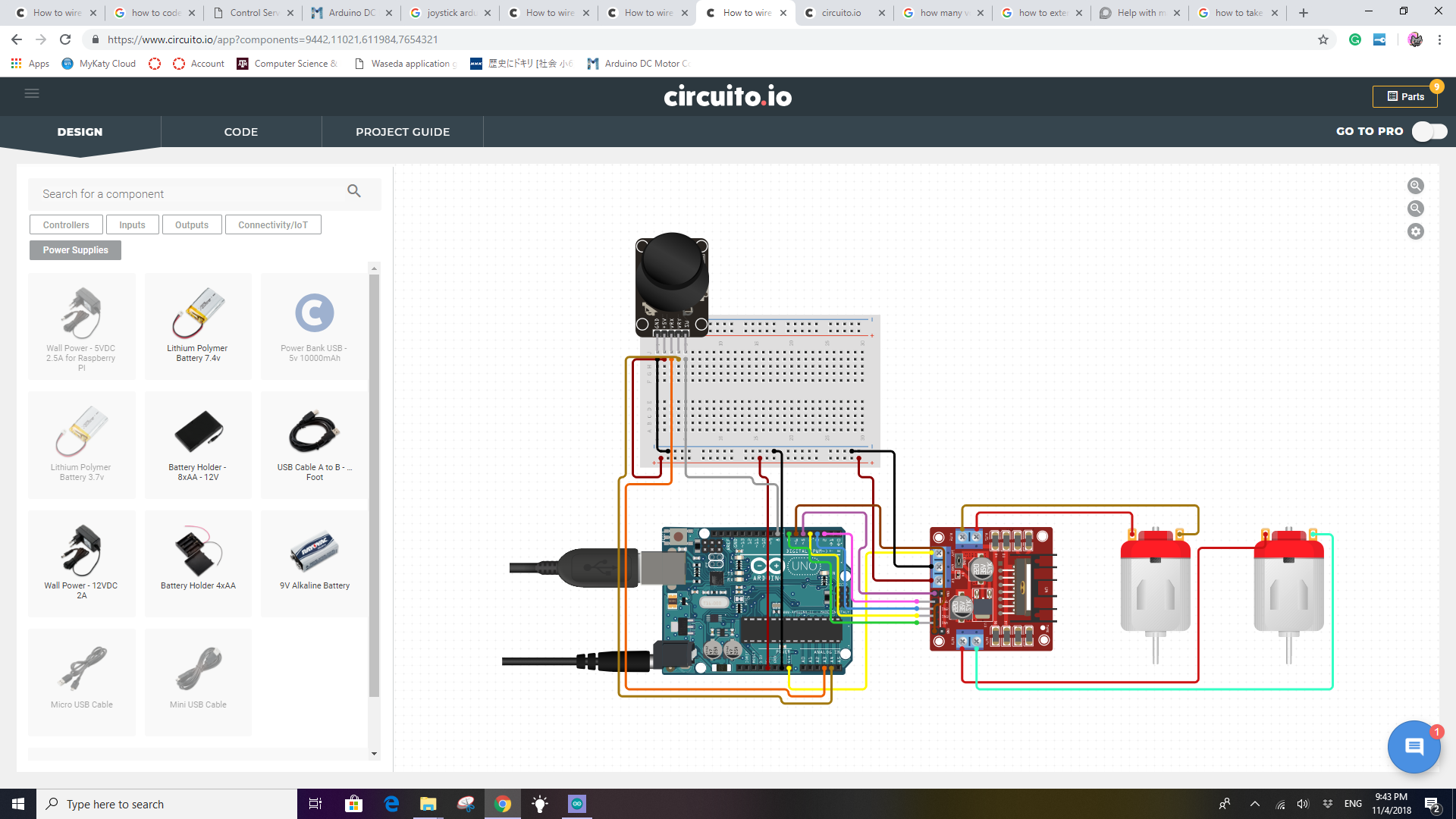
kindly can you send a photo for your code and your circuit.
ok I will send a pic for my code and circuit

This is the code
// Include Libraries
#include “Arduino.h”
#include “DCMDriverL298.h”
#include “Button.h”
#include “IR.h”
#include “IRremoteInt.h”
#include “IRremote.h”
// Pin Definitions
#define DCMOTORDRIVERL298_PIN_ENA 5
#define DCMOTORDRIVERL298_PIN_INT1 2
#define DCMOTORDRIVERL298_PIN_INT2 3
#define DCMOTORDRIVERL298_PIN_ENB 6
#define DCMOTORDRIVERL298_PIN_INT3 4
#define DCMOTORDRIVERL298_PIN_INT4 7
#define PUSHBUTTON_PIN_2 8
#define IR_PIN_OUT 9
// Global variables and defines
// object initialization
DCMDriverL298 dcMotorDriverL298(DCMOTORDRIVERL298_PIN_ENA,DCMOTORDRIVERL298_PIN_INT1,DCMOTORDRIVERL298_PIN_INT2,DCMOTORDRIVERL298_PIN_ENB,DCMOTORDRIVERL298_PIN_INT3,DCMOTORDRIVERL298_PIN_INT4);
Button pushButton(PUSHBUTTON_PIN_2);
IR ir(IR_PIN_OUT);
// define vars for testing menu
const int timeout = 10000; //define timeout of 10 sec
char menuOption = 0;
long time0;
// Setup the essentials for your circuit to work. It runs first every time your circuit is powered with electricity.
void setup()
{
// Setup Serial which is useful for debugging
// Use the Serial Monitor to view printed messages
Serial.begin(9600);
while (!Serial) ; // wait for serial port to connect. Needed for native USB
Serial.println(“start”);
pushButton.init();
// initialize IR device
ir.init();
menuOption = menu();
}
// Main logic of your circuit. It defines the interaction between the components you selected. After setup, it runs over and over again, in an eternal loop.
void loop()
{
if(menuOption == '1') {
// L298N Motor Driver Board Module - Test Code
//Start both motors. note that rotation direction is determined by the motors connection to the driver.
//You can change the speed by setting a value between 0-255, and set the direction by changing between 1 and 0.
dcMotorDriverL298.setMotorA(200,1);
dcMotorDriverL298.setMotorB(200,0);
delay(2000);
//Stop both motors
dcMotorDriverL298.stopMotors();
delay(2000);
}
else if(menuOption == '2') {
// Mini Pushbutton Switch - Test Code
//Read pushbutton state.
//if button is pressed function will return HIGH (1). if not function will return LOW (0).
//for debounce funtionality try also pushButton.onPress(), .onRelease() and .onChange().
//if debounce is not working properly try changing 'debounceDelay' variable in Button.h
bool pushButtonVal = pushButton.read();
Serial.print(F("Val: ")); Serial.println(pushButtonVal);
}
else if(menuOption == '3') {
// IR Receiver Diode - TSOP38238 - Test Code
//Receive IR code into irCode
long irCode = ir.detect();
// if a code was received print it to serial monitor, note that the code is of type long but printed in HEX
// Consider changing the if statment to something like: if(irCode == "YOUR IR CODE")
if(irCode)
{
Serial.print("0x");
Serial.println(irCode, HEX);
}
}
if (millis() - time0 > timeout)
{
menuOption = menu();
}
}
// Menu function for selecting the components to be tested
// Follow serial monitor for instrcutions
char menu()
{
Serial.println(F("\nWhich component would you like to test?"));
Serial.println(F("(1) L298N Motor Driver Board Module"));
Serial.println(F("(2) Mini Pushbutton Switch"));
Serial.println(F("(3) IR Receiver Diode - TSOP38238"));
Serial.println(F("(menu) send anything else or press on board reset button\n"));
while (!Serial.available());
// Read data from serial monitor if received
while (Serial.available())
{
char c = Serial.read();
if (isAlphaNumeric(c))
{
if(c == '1')
Serial.println(F("Now Testing L298N Motor Driver Board Module"));
else if(c == '2')
Serial.println(F("Now Testing Mini Pushbutton Switch"));
else if(c == '3')
Serial.println(F("Now Testing IR Receiver Diode - TSOP38238"));
else
{
Serial.println(F("illegal input!"));
return 0;
}
time0 = millis();
return c;
}
}
}
/*******************************************************
-
Circuito.io is an automatic generator of schematics and code for off
-
the shelf hardware combinations.
-
Copyright © 2016 Roboplan Technologies Ltd.
-
This program is free software: you can redistribute it and/or modify
-
it under the terms of the GNU General Public License as published by
-
the Free Software Foundation, either version 3 of the License, or
-
(at your option) any later version.
-
This program is distributed in the hope that it will be useful,
-
but WITHOUT ANY WARRANTY; without even the implied warranty of
-
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
-
GNU General Public License for more details.
-
You should have received a copy of the GNU General Public License
-
along with this program. If not, see http://www.gnu.org/licenses/.
-
In addition, and without limitation, to the disclaimers of warranties
-
stated above and in the GNU General Public License version 3 (or any
-
later version), Roboplan Technologies Ltd. (“Roboplan”) offers this
-
program subject to the following warranty disclaimers and by using
-
this program you acknowledge and agree to the following:
-
THIS PROGRAM IS PROVIDED ON AN “AS IS” AND “AS AVAILABLE” BASIS, AND
-
WITHOUT WARRANTIES OF ANY KIND EITHER EXPRESS OR IMPLIED. ROBOPLAN
-
HEREBY DISCLAIMS ALL WARRANTIES, EXPRESS OR IMPLIED, INCLUDING BUT
-
NOT LIMITED TO IMPLIED WARRANTIES OF MERCHANTABILITY, TITLE, FITNESS
-
FOR A PARTICULAR PURPOSE, NON-INFRINGEMENT, AND THOSE ARISING BY
-
STATUTE OR FROM A COURSE OF DEALING OR USAGE OF TRADE.
-
YOUR RELIANCE ON, OR USE OF THIS PROGRAM IS AT YOUR SOLE RISK.
-
ROBOPLAN DOES NOT GUARANTEE THAT THE PROGRAM WILL BE FREE OF, OR NOT
-
SUSCEPTIBLE TO, BUGS, SECURITY BREACHES, OR VIRUSES. ROBOPLAN DOES
-
NOT WARRANT THAT YOUR USE OF THE PROGRAM, INCLUDING PURSUANT TO
-
SCHEMATICS, INSTRUCTIONS OR RECOMMENDATIONS OF ROBOPLAN, WILL BE SAFE
-
FOR PERSONAL USE OR FOR PRODUCTION OR COMMERCIAL USE, WILL NOT
-
VIOLATE ANY THIRD PARTY RIGHTS, WILL PROVIDE THE INTENDED OR DESIRED
-
RESULTS, OR OPERATE AS YOU INTENDED OR AS MAY BE INDICATED BY ROBOPLAN.
-
YOU HEREBY WAIVE, AGREE NOT TO ASSERT AGAINST, AND RELEASE ROBOPLAN,
-
ITS LICENSORS AND AFFILIATES FROM, ANY CLAIMS IN CONNECTION WITH ANY OF
-
THE ABOVE.
********************************************************/
Sorry I did some research and it still doesn’t work with the new settings I put up
Here is the new picture and code